マインクラフトで学ぶプログラミング

ブロックによるビジュアルプログラミングを使用
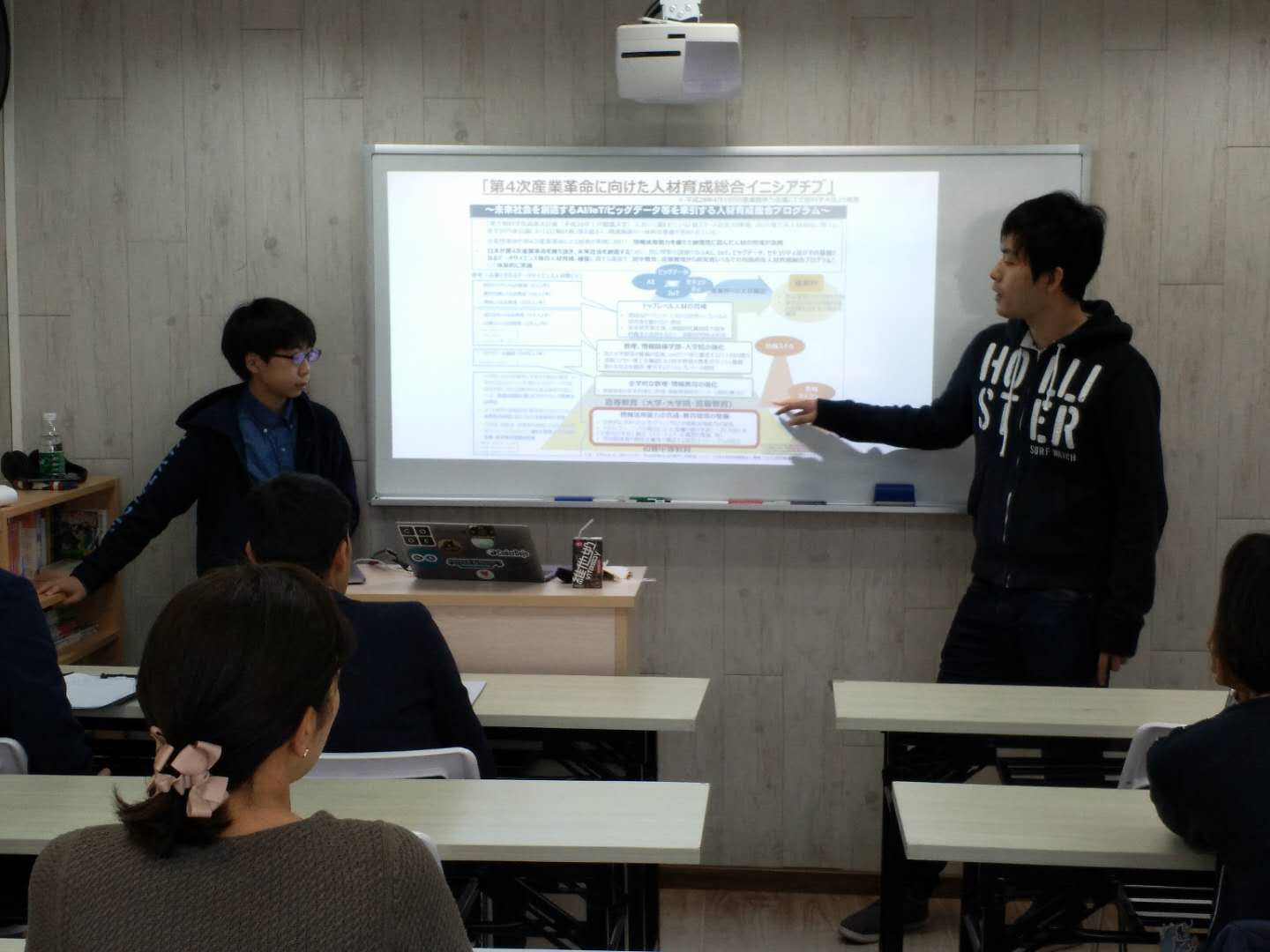
マイクロソフトのオフィスやマインクラフトエデュケーションの開発チームでプログラムマネージャだった鵜飼佑さんに、マインクラフト(Minecraft Education Edition)を使ったワークショップを開催していただきました。
マインクラフトで遊んだことがあっても、プログラミングはしたことがないという生徒がほとんどである中とてもとても楽しいワークショップとなりました。
2020年のプログラミング教育必修化において、プログラミングの学習の目的は、プログラマーが日本に不足していることや、プログラミング的思考力をつけることとも言われています。
正直そこには夢もありませんし、何を目指しているのかが捉えにくい印象が拭えないのですが、実際に文科省でプログラミング教育を推進されている鵜飼さんにお話しをうかがうと、もやもやとしていたイメージがとてもクリアになります。

トリが100羽降ってくる
まず小学校におけるプログラミング教育は、「プログラミングを楽しく体験する」ことが第一で、「またやってみたい、もっとやってみたい」という子供が増えることが一番だということです。それから、「プログミングによって解決できることがある」ことを知ることです。
人間が作業をしたら大変で、ミスをしてしまうこともコンピュータなら、ミスもなく楽にこなしてくれます。むしろそこがコンピュータの得意な分野であるわけです。
今回は、マインクラフトのプログラミング機能を使って、「階段を作る」「螺旋階段を作る」「空から100羽のニワトリを降らせる」などという手作業では非常に手間のかかることを1つの命令だけでやる方法を学びました。
この学びにおいて重要なことは、その時に入力したコマンドを覚えることではなく、プログラミングによって「複雑な作業を効率化できる」ということ、そして「プログラミングができたらもっともっと楽しくなる」ということです。
今回のたった1回のワークショップだけでも、「またやってみたい」、「もっとやってみたい」という声を多く聞くことができました。
2020年のプログラミング教育必修化は不安の声ばかりしか聞こえてきませんが、今回のワークショップを通してきっと楽しいものになるだろうと感じました。